Space Drone for Removal of Space Debris
Humans have a problem with littering, even in space. There are currently over a million pieces of space debris, specifically roughly 100,000 pieces of debris are 1 to 10 cm in diameter. These sizes of debris are the most dangerous as they go undetected and current protection systems are ineffective against them.
The project proposes a solution to the growing, alarming problem, space drones for removal of the space debris. The mission plan for the debris removal involves a fleet of space drones working with a mothership that acts as a refuelling point as well as a drop-off for the smaller drones to then manipulate the debris.
On the project, I worked on the vision system, translational test frame, the thermal management solution and the electrical sensors for the propulsion test rig. This involved managing multiple moving parts within these sections alone time as there was a large amount of work to be done in the timeline of the project.
The project concluded with a working propulsion test rig that was able to record the thrust forces to a high-level of accuracy, a space-grade thermal management solution as well as a working vision system for the navigation for the space drone.
Skills Used
Electrical System Design
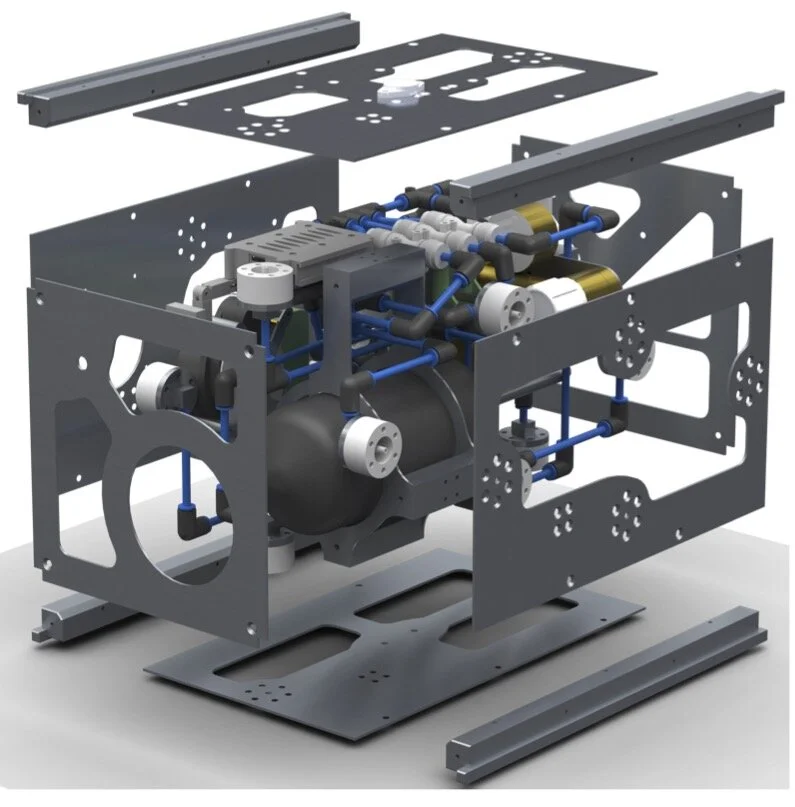
To operate the propulsion test rig, a couple electrical systems had to be designed. The final electrical systems used were to control a solenoid valve with high accuracy and precision as well as a pressure transducer. Other components such as a custom-made whetstone bridge and load cell were used as well.
Thermodynamics Solutions
Temperatures in Low Earth Orbit range from -120ºC to 120ºC. An appropriate thermal solution had to be designed to maintain optimum operating temperature for all the temperature sensitive components such as the Raspberry Pis.
Computer Vision Development
Navigating in space is an incredibly complex task, especially with the growing number of space debris posing a threat to space travel. A computer vision system capable of object detection and tracking was developed with Raspberry Pis and its camera modules to provide a proof-of-concept for the vision system.